
New deep learning technique paves path to pizza-making robots
This article is aspect of our coverage of the latest in AI analysis.
For humans, functioning with deformable objects is not appreciably far more tough than dealing with rigid objects. We study naturally to shape them, fold them, and manipulate them in different strategies and nevertheless identify them.
But for robots and artificial intelligence devices, manipulating deformable objects existing a big obstacle. Think about the collection of techniques that a robotic need to acquire to shape a ball of dough into pizza crusts. It should keep keep track of of the dough as it variations condition, and at the exact time, it need to decide on the suitable resource for each and every action of the function. These are challenging responsibilities for present-day AI methods, which are much more secure in dealing with rigid-overall body objects, which have more predictable states.

Now, a new deep learning technique developed by scientists at MIT, Carnegie Mellon College, and the College of California at San Diego, displays promise to make robotics programs a lot more stable in managing deformable objects. Termed DiffSkill, the system utilizes deep neural networks to master very simple capabilities and a setting up module for combining the abilities to fix duties that need numerous actions and instruments.
Dealing with deformable objects with reinforcement learning and deep studying
If an AI technique would like to tackle an object, it has to be capable to detect and outline its state and predict how it will search in the future. This is a dilemma that has been largely solved for rigid objects. With a superior established of coaching examples, a deep neural community will be capable to detect a rigid item from diverse angles. On the other hand, when it arrives to deformable objects, the house of feasible states results in being a great deal much more difficult.
“For rigid objects, we can describe its point out with six numbers: 3 figures for its XYZ coordinates and a different a few quantities for its orientation,” Xingyu Lin, Ph.D. student at CMU and direct writer of the DiffSkill paper, explained to TechTalks.
“However, deformable bodies, these as the dough or fabrics, have infinite degrees of liberty, making it a lot additional challenging to describe their states exactly. On top of that, the techniques they deform are also more difficult to model in a mathematical way in comparison to rigid bodies.”
The progress of differentiable physics simulators enabled the software of gradient-based mostly strategies to address deformable object manipulation tasks. This is in distinction to the classic reinforcement studying technique that tries to learn the dynamics of the atmosphere and objects by means of pure trial-and-error interactions.
DiffSkill was impressed by PlasticineLab, a differentiable physics simulator that was presented at the ICLR meeting in 2021. PlasticineLab showed that differentiable simulators can assist shorter-horizon responsibilities.
But differentiable simulators however struggle with very long-horizon challenges that require multiple techniques and the use of distinct applications. AI methods primarily based on differentiable simulators also involve the agent to know the whole simulation condition and pertinent actual physical parameters of the setting. This is in particular restricting for true-earth purposes, the place the agent commonly perceives the planet via visible and depth sensory details (RGB-D).
“We started out to ask if we can extract [the steps required to accomplish a task] as skills and also master abstract notions about the abilities so that we can chain them to resolve a lot more sophisticated duties,” Lin explained.
DiffSkill is a framework the place the AI agent learns talent abstraction utilizing the differentiable physics model and composes them to complete difficult manipulation duties.
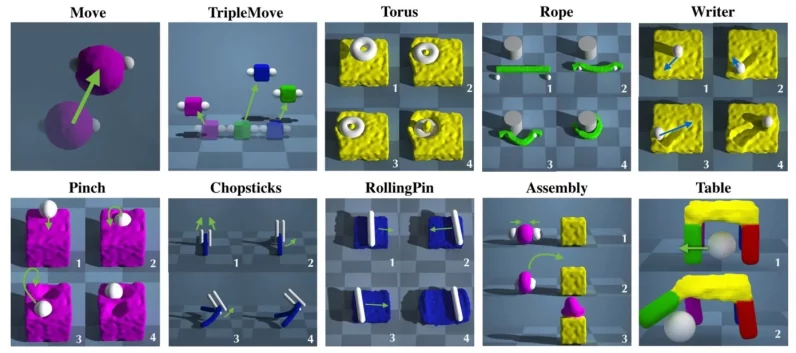
Lin’s previous perform was concentrated on using reinforcement finding out for the manipulation of deformable objects these kinds of as cloth, ropes, and liquids. For DiffSkill, he selected dough manipulation for the reason that of the troubles it poses.
“Dough manipulation is particularly attention-grabbing due to the fact it are not able to be simply performed with the robot gripper, but requires employing various applications sequentially, a little something individuals are great at but is not pretty common for robots to do,” Lin stated.
Once trained, DiffSkill can properly accomplish a established of dough manipulation duties making use of only RGB-D enter.
Discovering abstract competencies with neural networks
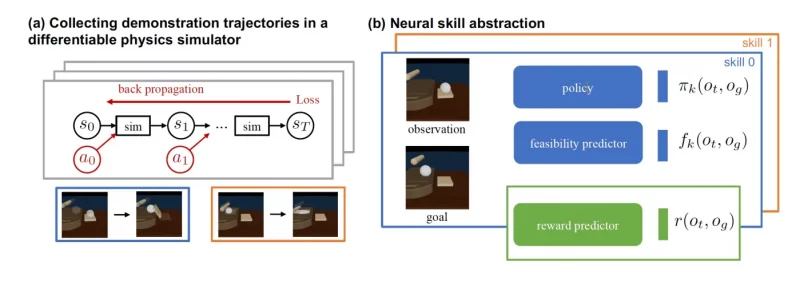
DiffSkill is composed of two important factors: a “neural ability abstractor” that takes advantage of neural networks to discover unique abilities and a “planner” that composes the talent to clear up extensive-horizon tasks.
DiffSkill makes use of a differentiable physics simulator to create instruction examples for the talent abstractor. These samples demonstrate how to accomplish a shorter-horizon target with a one device, such as using a roller to spread the dough or a spatula to displace the dough.
These illustrations are introduced to the skill abstractor as RGB-D videos. Provided an graphic observation, the skill abstractor must predict whether the desired purpose is possible or not. The design learns and tunes its parameters by evaluating its prediction with the precise outcome of the physics simulator.
Robotic manipulation of deformable objects like dough needs extensive-horizon reasoning about the use of distinctive tools. Our approach DiffSkill utilizes a differentiable simulator to study and compose techniques for these complicated tasks. #ICLR2022
Website: https://t.co/1JFDUxfIyC pic.twitter.com/rNRJ1XskGB— Xingyu Lin (@Xingyu2017) April 27, 2022
At the identical time, DiffSkill trains a variational autoencoder (VAE) to learn a latent-room representation of the illustrations generated by the physics simulator. The VAE encodes images in a reduce-dimension house that preserves essential attributes and discards information that is not suitable to the task. By transferring the high-dimensional graphic room into the latent place, the VAE plays an crucial role in enabling DiffSkill to system about extended horizons and forecast results by observing sensory knowledge.
One particular of the important issues of education the VAE is building absolutely sure it learns the correct characteristics and generalizes to the authentic environment, exactly where the composition of visible info is distinct from all those created by the physics simulator. For illustration, the coloration of the roller pin or the table is not pertinent to the task, but the place and angle of the roller and the location of the dough are.
At present, the scientists are making use of a procedure known as “domain randomization,” which randomizes the irrelevant properties of the teaching ecosystem these types of as qualifications and lights, and keeps the crucial options this kind of as the place and orientation of resources. This would make the VAE much more steady when applied to the real entire world.
“Doing this is not straightforward, as we require to go over all achievable versions that are unique between the simulation and the genuine earth [known as the sim2real gap],” Lin stated. “A superior way is to use a 3D stage cloud as illustration of the scene, which is substantially less difficult to transfer from simulation to the actual planet. In reality, we are operating on a adhere to-up undertaking utilizing issue cloud as input.”
Arranging lengthy-horizon deformable item duties
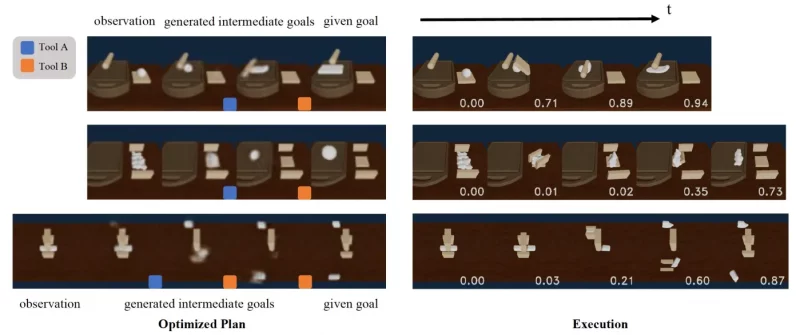
Once the ability abstractor is experienced, DiffSkill employs the planner module to clear up extensive-horizon responsibilities. The planner need to figure out the number and sequence of skills necessary to go from the preliminary point out to the place.
This planner iterates about feasible mixtures of skills and the intermediate results they generate. The variational autoencoder comes in useful right here. Rather of predicting whole graphic outcomes, DiffSkill employs the VAE to predict the latent-room final result of intermediate measures towards the remaining target.
The mix of summary competencies and latent-house representations will make it a great deal additional computationally effective to draw a trajectory from the first state to the objective. In reality, the scientists did not require to enhance the look for functionality and made use of an exhaustive research of all combinations.
“The computation is not as well significantly since we are arranging above the competencies and the horizon is not pretty extended,” Lin claimed. “This exhaustive search removes the will need for creating a sketch for the planner and may guide to novel alternatives not deemed by the designer in a much more general way, while we did not notice this in the restricted responsibilities we attempted. Additionally, a lot more innovative lookup approaches could be utilized as well”
According to the DiffSkill paper, “optimization can be done competently in all around 10 seconds for each and every ability mix on a solitary NVIDIA 2080Ti GPU.”
Planning the pizza dough with DiffSkill
The scientists examined the efficiency of DiffSkill in opposition to numerous baseline techniques that have been utilized to deformable objects, like two product-absolutely free reinforcement finding out algorithms and a trajectory optimizer that only makes use of the physics simulator.
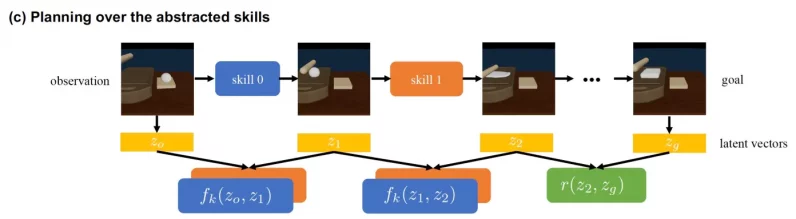
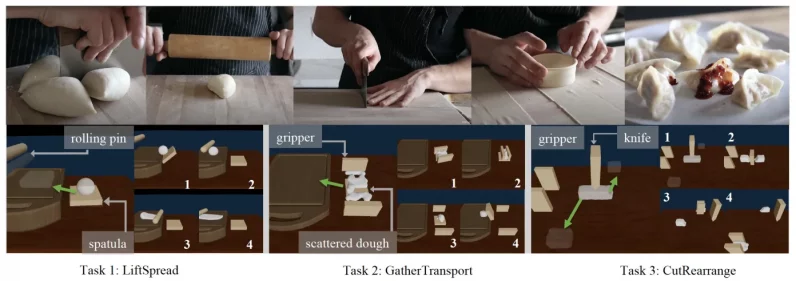
The types were examined on a number of jobs that need several ways and equipment. For instance, in 1 of the responsibilities, the AI agent will have to carry the dough with a spatula, put it on a cutting board, and distribute it with a roller.
The success present that DiffSkill is substantially improved than other strategies at solving very long-horizon, various-resource responsibilities making use of only sensory details. The experiments present that when very well experienced, DiffSkill’s planner can locate excellent intermediate states amongst the preliminary and target states and obtain respectable sequences of skills to resolve duties.
“One takeaway is that a set of competencies can deliver very crucial temporal abstraction, making it possible for us to explanation around extensive-horizon,” Lin claimed. “This is also very similar to how human methods various responsibilities: imagining at different temporal abstractions in its place of pondering what to do at every single subsequent second.”
Nevertheless, there are also restrictions to DiffSkill’s ability. For case in point, when undertaking one of the jobs that required three-phase scheduling, DiffSkill’s effectiveness degrades appreciably (even though it is nonetheless much better than other methods). Lin also talked about that in some scenarios, the feasibility predictor generates fake positives. The scientists imagine that studying a much better latent area can assistance clear up this difficulty.
The researchers are also discovering other directions to boost DiffSkill, which includes a additional effective planner algorithm that can be made use of for for a longer time horizon tasks.
Lin hopes that one particular day, he can use DiffSkill on serious pizza-building robots. “We are still considerably from this. Numerous difficulties emerge from manage, sim2authentic transfer, and basic safety. But we are now a lot more confident at seeking some extensive-horizon responsibilities,” he explained.
This report was at first revealed by Ben Dickson on TechTalks, a publication that examines trends in technology, how they have an effect on the way we live and do organization, and the issues they address. But we also talk about the evil side of know-how, the darker implications of new tech, and what we want to glance out for. You can browse the first article listed here.